
SBGames - 2025
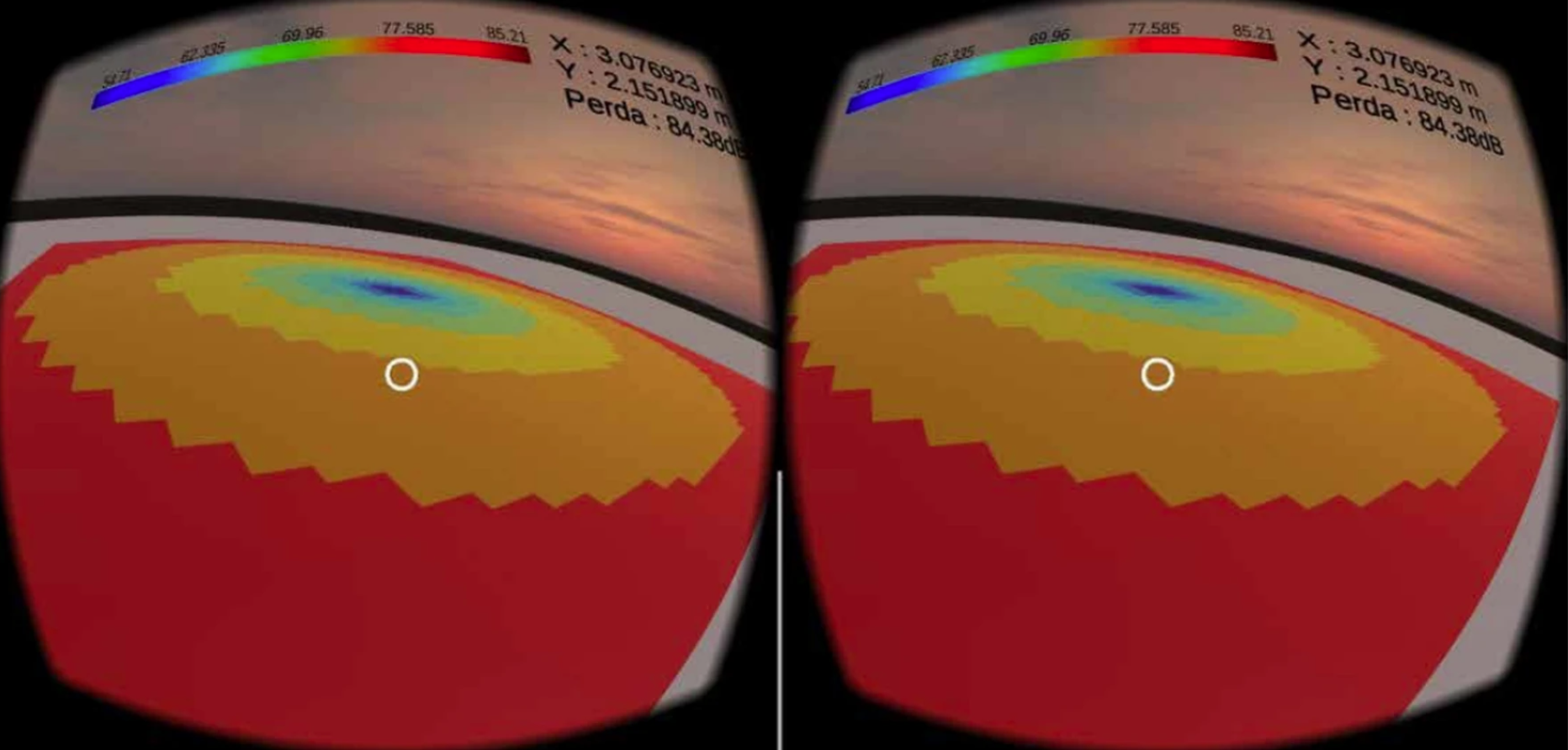
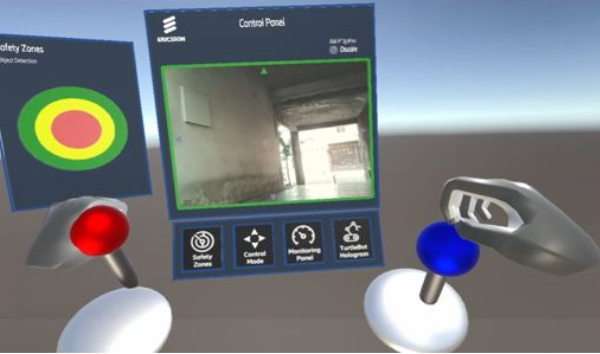
Mixed Reality for Remote Supervision

ICUAS - 2025
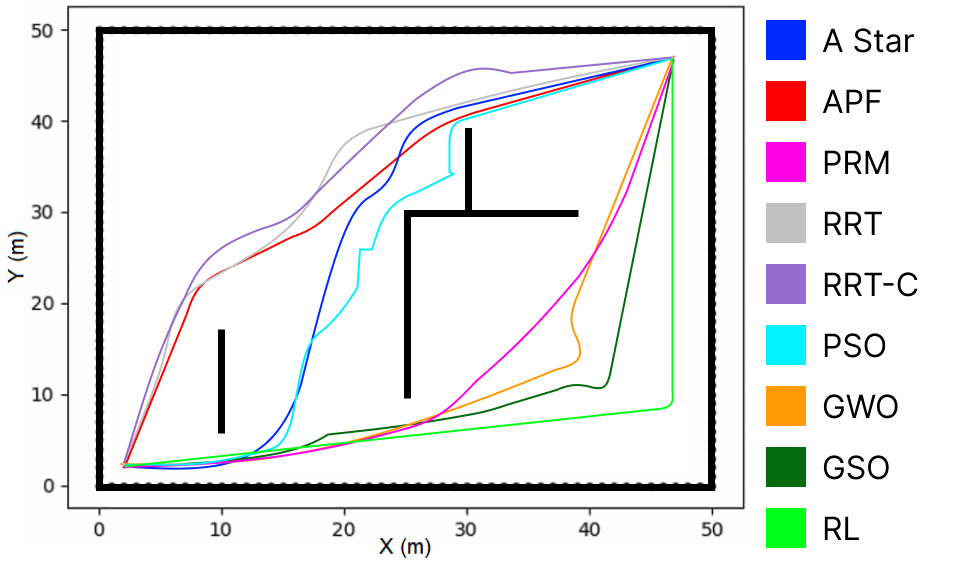
Effective Path Planning through Integrated Q-Learning and Classical Algorithms

ICUAS - 2025
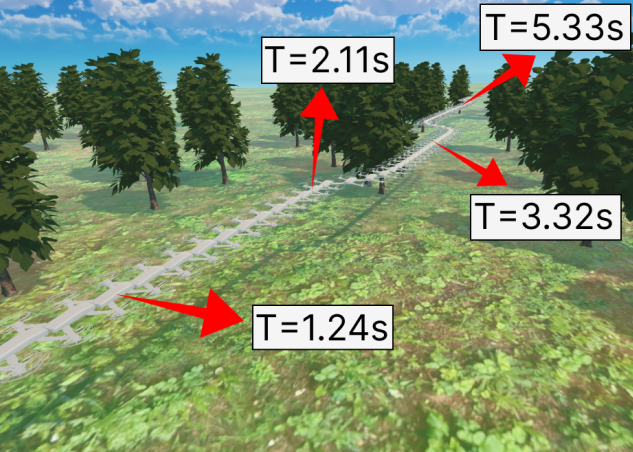
Real-Time Mapping and Tree Measurements

IJIRA - 2025
Dynamic Q‑planning for online UAV path planning
IROS - 2024
Agile Flights via Deep Reinforcement Learning

JINT - 2024
Multi-UAV Collaborative System
IJIRA - 2023
Performance analysis
ICUAS - 2023
Overview for High-Speed Flight
Soft Computing - 2023
Ziwi: indoor and outdoor planning network
LARS CTDR - 2022
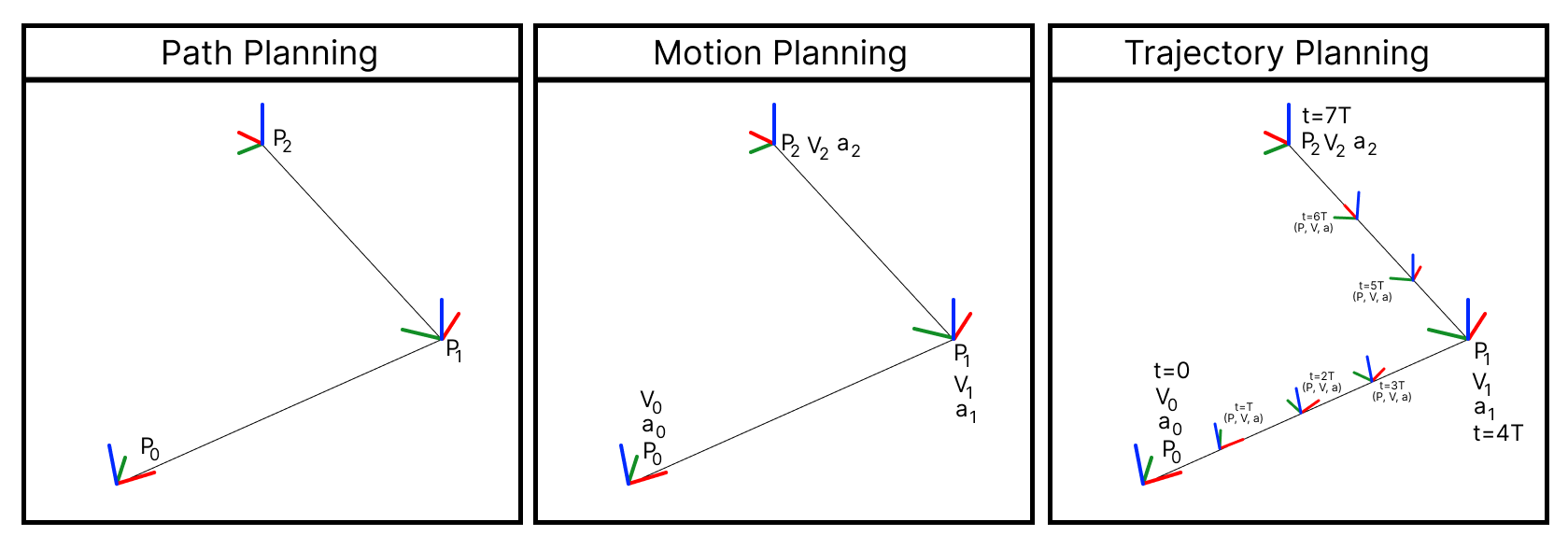
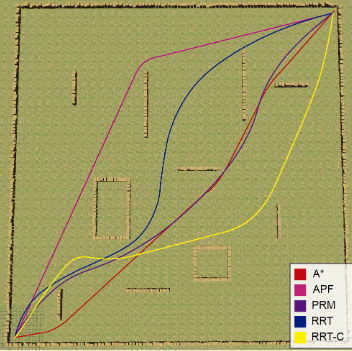
Path Planning Algorithms for UAVs

ICUAS - 2022
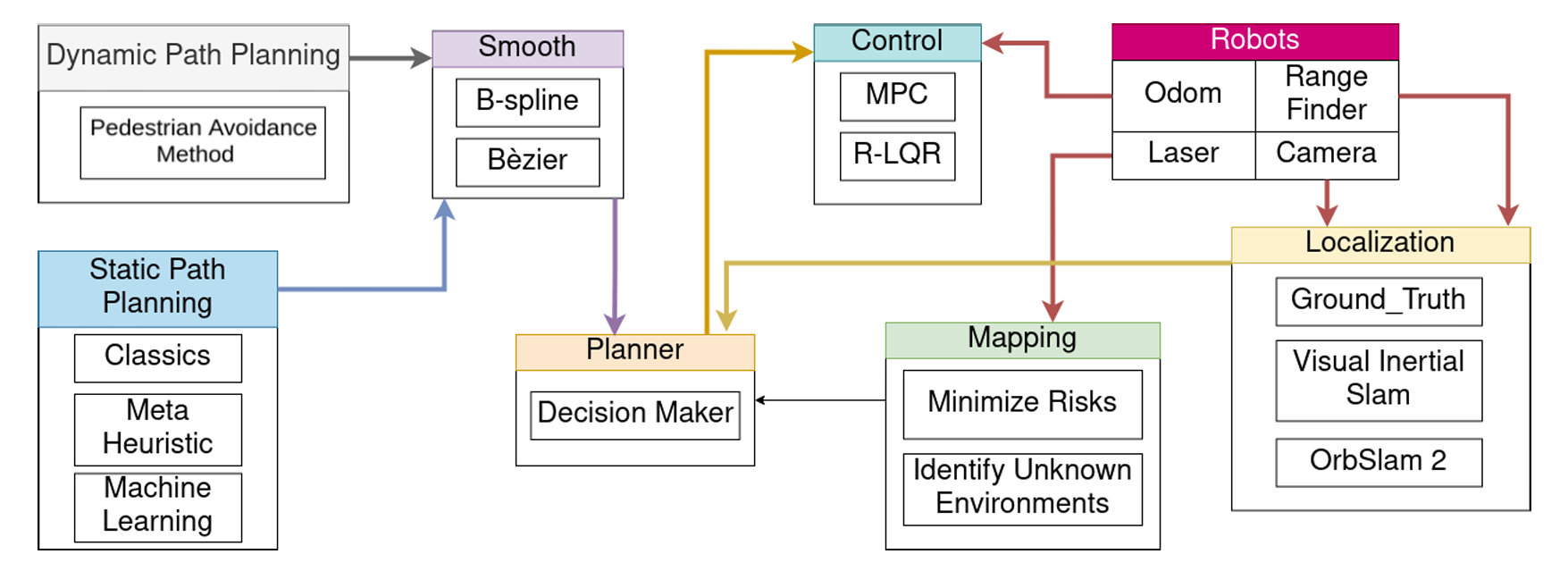
Plannie: A benchmark framework
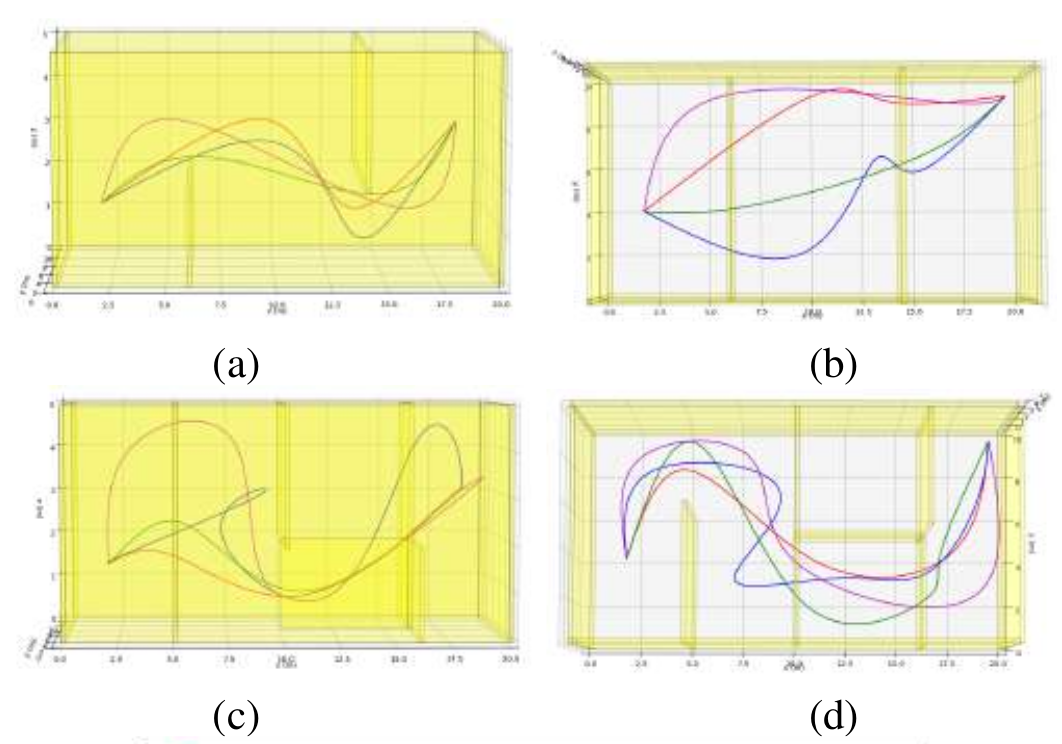
ICUAS - 2022
A 3D Benchmark
LARS - 2021
Contributions of Classical Path Planning Techniques
LARS - 2021
Extended Reality for Robots
LARS - 2021
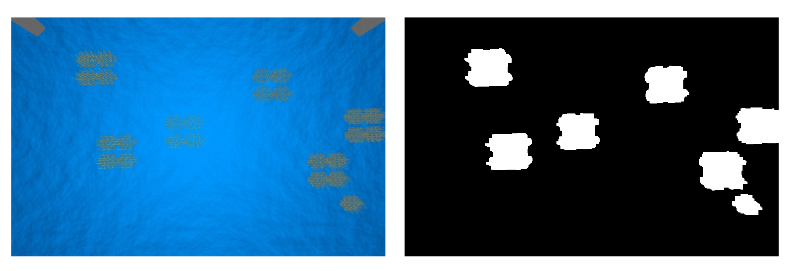
Algae Monitoring with UAV
LARS - 2021
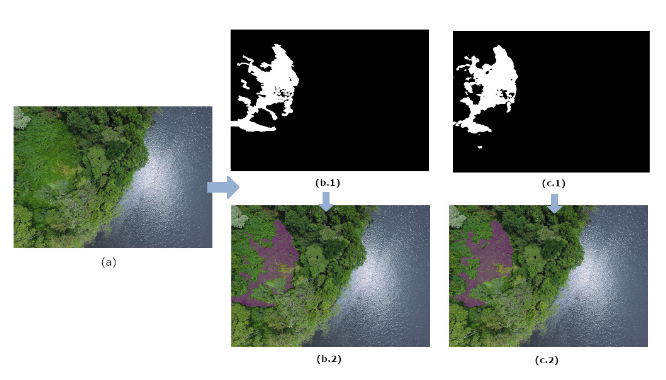
Detect Vegetation with UAV

ICUAS - 2021
Novel - Classical Approach

LARS - 2020
Review - Metaheurist Approach

Brazilian Journal of Development - 2020
Evaluation of Coverage and Capcity
Brazilian Journal of Development - 2020
Indoor Simulator for Next Generation

IMOC - 2019
Modeling in Corridors at 10 GHz
Encom - 2018
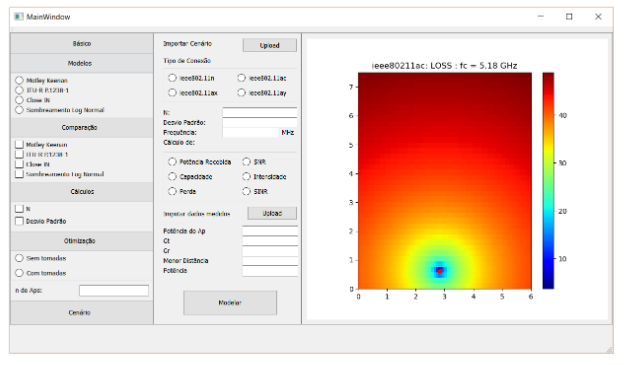
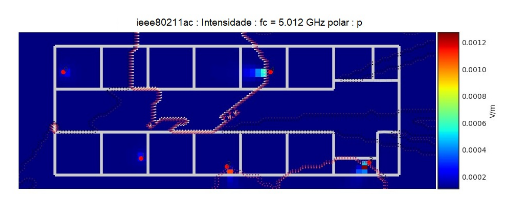
Coverage analysis with PyLayers
Momag - 2018
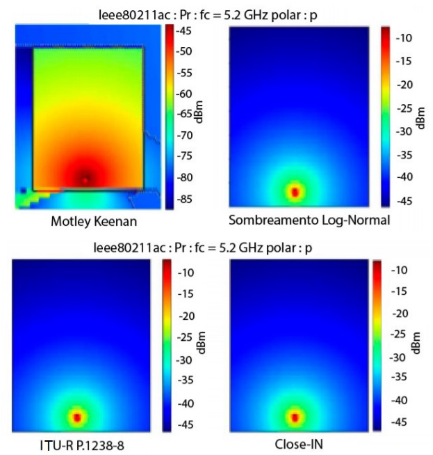
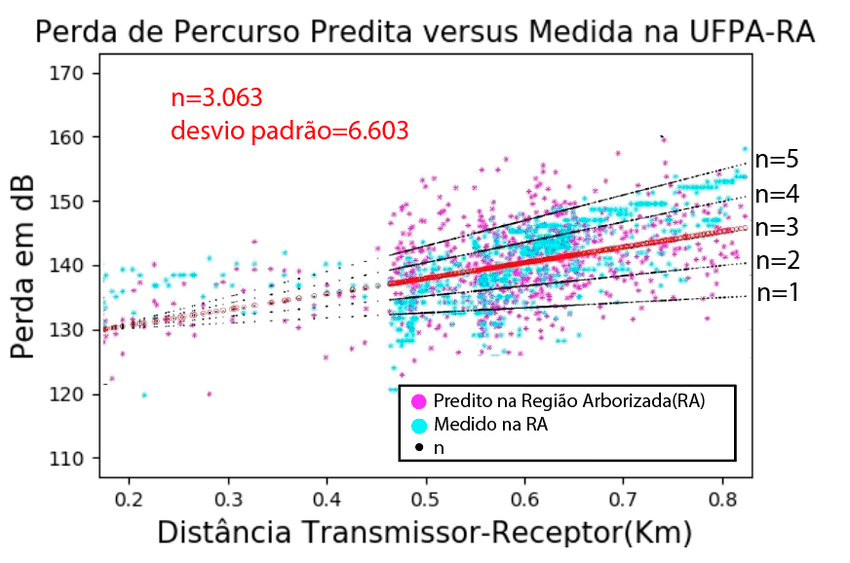
Path Loss Characterization

Momag - 2018
Radiation Assessment 3D module

SBGames - 2018
ANN to recognize pattern

SBGames - 2018
Do it yourself
I CTDA - 2017
Custom PyLayers
SBGames - 2017
BattleTest

SBPC - 2016
OPS

EREDS - 2015
Forecast System for Buses